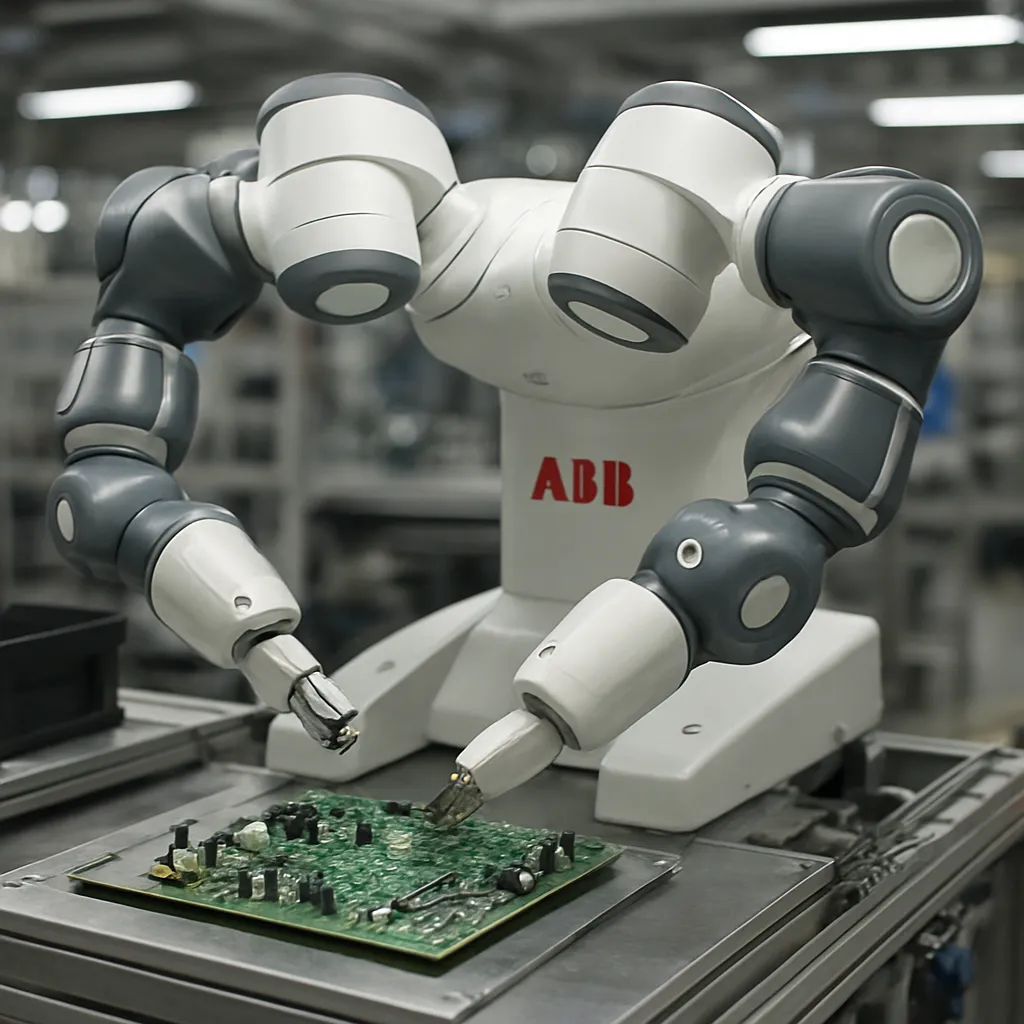
Robot współpracujący IRB 14050 YuMi to jedna z najbardziej rozpoznawalnych konstrukcji w ofercie ABB, zaprojektowana z myślą o bezpośredniej współpracy z człowiekiem w środowisku przemysłowym, w szczególności w przemyśle elektronicznym. Dwuramienna budowa, zaawansowane systemy bezpieczeństwa oraz precyzja manipulacji czynią z niego narzędzie, które wspiera automatyzację zadań montażowych, testowych i kontrolnych tam, gdzie klasyczne roboty przemysłowe były dotąd zbyt sztywne lub zbyt niebezpieczne. To rozwiązanie, które łączy świat tradycyjnej robotyki z ideą elastycznej produkcji, nastawionej na krótkie serie i szybkie przezbrojenia linii.
Charakterystyka i budowa robota IRB 14050 YuMi
IRB 14050 YuMi to dwuramienny robot współpracujący (cobot) zaprojektowany jako odpowiedź na rosnące zapotrzebowanie na automatyzację w branżach wymagających dużej precyzji i powtarzalności, przy jednoczesnym utrzymaniu bezpiecznej obecności człowieka w tej samej strefie roboczej. Opracowany przez ABB, globalnego lidera w dziedzinie automatyki i robotyki, stał się jednym z symboli tzw. współpracującej czwartej rewolucji przemysłowej.
Najbardziej charakterystycznym elementem konstrukcji YuMi są jego dwa niezależne ramiona, każde o kilku stopniach swobody, zakończone chwytakami lub innymi narzędziami manipulacyjnymi. Ramiona osadzone są na wspólnym korpusie, który można zamocować na stole montażowym, specjalnej ramie lub zintegrować z istniejącymi stanowiskami produkcyjnymi. Obłe, zaokrąglone kształty oraz brak ostrych krawędzi mają na celu minimalizację ryzyka urazu przy ewentualnym kontakcie z operatorem.
Istotną cechą YuMi jest zastosowanie wbudowanych czujników momentu w napędach, które pozwalają na wykrycie kolizji, a następnie natychmiastowe zatrzymanie ruchu. Dzięki temu robot może pracować bez tradycyjnych wygrodzeń bezpieczeństwa, co znacząco obniża koszt i skraca czas wdrożenia. Jednocześnie umożliwia to bardziej elastyczne projektowanie layoutu linii produkcyjnej – stanowisko z YuMi można umieścić bezpośrednio przy stanowisku manualnym, gdzie człowiek i robot dzielą się zadaniami.
YuMi został uproszczony pod względem obsługi tak, aby jego programowanie i rekonfiguracja nie wymagały wyłącznie wysoko wyspecjalizowanych inżynierów robotyków. Zastosowanie intuicyjnych interfejsów, takich jak programowanie przez prowadzenie (ang. lead-through programming), pozwala na „nauczanie” robota poprzez ręczne prowadzenie jego ramion po pożądanej trajektorii. Dodatkowo, środowiska programistyczne ABB umożliwiają integrację z systemami wizyjnymi oraz standardowymi protokołami komunikacyjnymi używanymi w przemyśle.
Robot ten został opracowany z myślą o pracy przy małych, delikatnych komponentach – np. w montażu elektroniki – co wymaga wysokiej powtarzalności i jednocześnie precyzyjnej kontroli siły chwytu. YuMi można wyposażyć w wyspecjalizowane chwytaki: próżniowe, mechaniczne, a także narzędzia do wkręcania, wciskania, zaciskania czy obsługi testów elektrycznych, dzięki czemu może realizować skomplikowane zadania montażowe w złożonych aplikacjach.
Zastosowania i branże przemysłu, w których pracuje IRB 14050 YuMi
Podstawowym obszarem zastosowań IRB 14050 YuMi jest przemysł elektroniczny, gdzie dominują zadania wymagające dużej dokładności, kontroli jakości i powtarzalności, przy jednoczesnej konieczności elastycznego dostosowywania się do częstych zmian produktów. Branża ta charakteryzuje się krótkimi cyklami życia wyrobów, rosnącą personalizacją oraz wysokimi wymaganiami odnośnie do miniaturyzacji komponentów.
W fabrykach produkujących sprzęt elektroniczny YuMi jest wykorzystywany między innymi do:
- montażu płytek PCB o średnim stopniu złożoności, w tym ręcznego uzupełniania elementów THT i precyzyjnych komponentów SMD,
- montażu modułów i podzespołów do smartfonów, tabletów, zegarków inteligentnych oraz urządzeń wearables,
- operacji wkręcania śrub, łączenia złącz, osadzania elementów mechanicznych w urządzeniach,
- testowania funkcjonalnego i elektrycznego gotowych modułów, w tym obsługi fixture’ów testowych,
- pakowania końcowego, etykietowania, sortowania małych komponentów i ich podawania na kolejne stacje.
Poza stricte elektronicznym sektorem konsumenckim, IRB 14050 YuMi znajduje zastosowanie w przemyśle elektrotechnicznym i produkcji komponentów dla sektora automatyki przemysłowej. Może obsługiwać montaż przekaźników, styczników, drobnych elementów aparatury rozdzielczej, a także niewielkich modułów sterowników PLC lub paneli operatorskich. W takich środowiskach YuMi często współdzieli stanowiska z operatorami, realizując żmudne czynności powtarzalne, pozostawiając ludziom zadania wymagające bardziej złożonych decyzji.
Coraz częściej robot ten pojawia się również w branży motoryzacyjnej, zwłaszcza w obszarach powiązanych z elektroniką samochodową. Może być wykorzystywany do:
- montażu podzespołów czujników, modułów radarowych i kamer wspomagających systemy ADAS,
- obsługi modułów sterujących ECU, BMS dla pojazdów elektrycznych oraz układów infotainment,
- montażu złącz i wiązek przewodów w mniejszych podzespołach.
Innym, rozwijającym się obszarem wykorzystania YuMi jest branża medyczna i produkcja urządzeń medycznych: złożonych instrumentów chirurgicznych, komponentów do sprzętu diagnostycznego czy drobnych wyrobów medycznych. Wymagają one nie tylko wysokiej dokładności montażu, lecz także zgodności z restrykcyjnymi normami jakościowymi. W tego typu procesach YuMi może uczestniczyć w montażu i kontroli jakości elementów, często we współpracy z systemami wizyjnymi do inspekcji.
Robot ten jest także obecny w sektorze dóbr luksusowych, jak produkcja zegarków czy precyzyjnej biżuterii, gdzie kluczowe jest powtarzalne wykonywanie drobnych, monotonicznych czynności montażowych. Delikatne ruchy ramion oraz precyzyjna kontrola siły zastosowana w napędach pomaga ograniczyć ryzyko uszkodzenia drogich komponentów. YuMi może na przykład osadzać małe elementy dekoracyjne, mocować tarcze, wskazówki czy wykonywać czynności związane z kalibracją lub wstępnym testowaniem mechanizmów.
Na uczelniach technicznych i w centrach badawczo-rozwojowych IRB 14050 YuMi pełni często rolę platformy do eksperymentów z zakresu robotyki współpracującej, sztucznej inteligencji i uczenia maszynowego w zastosowaniach przemysłowych. Dzięki temu kolejne pokolenia inżynierów poznają w praktyce zasady programowania cobotów, integracji z systemami wizyjnymi czy projektowania bezpiecznych stanowisk pracy typu human-robot collaboration.
Dane techniczne i możliwości techniczne IRB 14050 YuMi
IRB 14050 YuMi został zaprojektowany z myślą o obsłudze niewielkich elementów, dlatego jego parametry techniczne koncentrują się na precyzji oraz bezpieczeństwie, a nie na dużych udźwigach czy zasięgach charakterystycznych dla klasycznych robotów przemysłowych. Każde z dwóch ramion YuMi ma zasięg rzędu kilkuset milimetrów (w praktyce około 559 mm na ramię), co wystarcza do obsługi zadań montażowych w bezpośrednim sąsiedztwie stanowiska roboczego. Mały zasięg jest zarazem zaletą – ogranicza przestrzeń zajmowaną przez stanowisko oraz zwiększa powtarzalność pozycjonowania.
Udźwig pojedynczego ramienia to kilka kilogramów (w typowej konfiguracji około 0,5 kg w optymalnym obszarze pracy, z pewnymi wariantami zależnymi od zastosowanego chwytaka), co jest w zupełności wystarczające dla większości operacji w przemyśle elektronicznym i montażu drobnych komponentów. Zastosowanie lekkich narzędzi końcowych pozwala zachować wysoką dynamikę ruchu przy jednoczesnym zachowaniu bezpiecznego kontaktu w przypadku kolizji z człowiekiem.
Powtarzalność pozycjonowania kształtuje się na poziomie dziesiątych części milimetra, co dla zadań takich jak precyzyjne osadzanie złącz, komponentów SMD czy manipulatorów testowych jest wartością wystarczającą. YuMi wykorzystuje zaawansowane algorytmy sterowania ruchem, które uwzględniają zarówno parametry dynamiczne układu, jak i ograniczenia wynikające z konieczności zapewnienia współpracy z człowiekiem – gdy wymagana jest wyższa prędkość ruchu, stosowane są odpowiednie strefy bezpieczeństwa oraz kontrola sił.
Robot działa w oparciu o sterownik ABB (w zależności od wersji – m.in. kontrolery z rodziny IRC5 lub ich kompaktowe odmiany), obsługujący język programowania RAPID oraz różne środowiska graficzne do konfiguracji zadań. Dostępne są także narzędzia programistyczne umożliwiające integrację z systemami CAD, symulacją offline oraz zewnętrznymi systemami wizyjnymi. Dzięki temu możliwe jest projektowanie i testowanie aplikacji bez konieczności zatrzymywania fizycznej linii produkcyjnej.
Ważnym elementem specyfikacji technicznej są rozbudowane funkcje bezpieczeństwa. YuMi ma wbudowane ograniczenia prędkości, momentu i mocy, które można skonfigurować w zależności od aplikacji i poziomu ryzyka. Standardowe funkcje bezpieczeństwa obejmują m.in.:
- monitorowanie prędkości i pozycji,
- wbudowaną detekcję kolizji,
- bezpieczne zatrzymywanie ruchu przy przekroczeniu zadanych progów,
- możliwość współpracy z zewnętrznymi systemami bezpieczeństwa (skanery, kurtyny świetlne).
Budowa YuMi przewiduje stosunkowo prosty montaż mechaniczny na stołach, ramach czy konstrukcjach specjalnych. Dzięki zintegrowanemu okablowaniu wewnętrznemu oraz kompaktowej formie, robot nie wymaga dużej ilości dodatkowej przestrzeni na przewody. To ułatwia jego integrację w istniejących liniach produkcyjnych, szczególnie w fabrykach, w których wcześniejsze procesy były oparte na ręcznym montażu.
W kontekście energetycznym YuMi wyróżnia się niskim zużyciem energii – małe silniki, lekkie elementy konstrukcyjne i zoptymalizowane trajektorie ruchu sprawiają, że jest on relatywnie ekonomicznym rozwiązaniem. Parametry te są istotne szczególnie w kontekście rosnących kosztów energii oraz dążenia przemysłu do redukcji śladu węglowego, co czyni go atrakcyjnym wyborem nie tylko ze względów technicznych, ale również środowiskowych.
Producent, rozwój koncepcji YuMi i znaczenie gospodarcze
IRB 14050 YuMi jest produktem firmy ABB, jednego z najważniejszych globalnych dostawców technologii dla energetyki, robotyki i automatyki przemysłowej. ABB, posiadając wieloletnie doświadczenie w opracowywaniu klasycznych robotów sześcioosiowych, zdecydowało się na stworzenie linii robotów współpracujących jako odpowiedź na potrzebę bliższej integracji zadań manualnych i zautomatyzowanych.
Nazwa YuMi pochodzi od angielskiego hasła „you and me” i ma symbolizować współpracę człowieka i robota w jednym środowisku. Koncepcja ta wybiega poza tradycyjne pojmowanie automatyzacji, kojarzonej z odseparowaniem ludzi od maszyn za pomocą wygrodzeń i barier. Celem YuMi jest raczej połączenie zalet ludzkiej elastyczności, kreatywności i zdolności reakcji na nieprzewidziane sytuacje z dokładnością, wytrzymałością i powtarzalnością robotów.
Znaczenie gospodarcze IRB 14050 YuMi można rozpatrywać na kilku poziomach. Na poziomie przedsiębiorstw produkcyjnych robot ten umożliwia:
- redukcję kosztów w długim okresie, poprzez automatyzację zadań powtarzalnych i obciążających ergonomicznie pracowników,
- zwiększenie jakości produkcji dzięki stabilnej powtarzalności procesów i ograniczeniu błędów ludzkich,
- podniesienie elastyczności linii – przez szybkie przezbrajanie i możliwość obsługi krótkich serii produkcyjnych,
- utrzymanie lub przywrócenie produkcji w krajach o wyższych kosztach pracy, przy zachowaniu konkurencyjnych cen.
Na poziomie gospodarek narodowych pojawienie się robotów współpracujących, takich jak YuMi, wspiera proces reindustrializacji i transformacji w kierunku produkcji wysokiej wartości dodanej. Firmy są w stanie utrzymać produkcję bardziej zaawansowanych technologicznie wyrobów lokalnie, zamiast przenosić ją do krajów o niskich kosztach pracy. Zwiększa to odporność łańcuchów dostaw, co stało się szczególnie istotne w obliczu zaburzeń globalnych, takich jak kryzysy logistyczne czy konflikty geopolityczne.
YuMi sprzyja również zmianom na rynku pracy. Z jednej strony automatyzacja pewnych zadań manualnych może prowadzić do redukcji liczby stanowisk opierających się na prostych, powtarzalnych czynnościach. Z drugiej jednak strony tworzy zapotrzebowanie na nowych specjalistów: inżynierów automatyki, programistów, techników utrzymania ruchu oraz operatorów potrafiących obsługiwać i rekonfigurować coboty. Rozwój kompetencji w obszarze robotyki współpracującej staje się jednym z istotnych kierunków kształcenia zawodowego i akademickiego.
W szerszej perspektywie gospodarczej IRB 14050 YuMi jest elementem trendu, który prowadzi do coraz większego zintegrowania technologii cyfrowych, w tym analityki danych i sztucznej inteligencji, z systemami produkcyjnymi. Dane zebrane z pracy robota – informacje o czasach cyklu, błędach montażu, awariach czy stopniu wykorzystania zasobów – mogą być wykorzystywane do optymalizacji całych linii, przewidywania awarii (predictive maintenance) oraz planowania produkcji. To przyczynia się do wzrostu wydajności, lepszego wykorzystania materiałów i redukcji strat.
Nie bez znaczenia jest także wizerunkowy i marketingowy aspekt implementacji YuMi w zakładach produkcyjnych. Obecność zaawansowanych robotów współpracujących, szczególnie tak rozpoznawalnych jak IRB 14050, jest często prezentowana jako dowód innowacyjności przedsiębiorstwa, co może wpływać na relacje z klientami, inwestorami i partnerami technologicznymi. Firmy korzystające z YuMi nierzadko eksponują ten fakt w komunikacji zewnętrznej, podkreślając nowoczesny charakter swoich procesów produkcyjnych.
Bezpieczeństwo, ergonomia pracy i współpraca z człowiekiem
Jednym z kluczowych założeń przy projektowaniu IRB 14050 YuMi była możliwość bezpośredniej współpracy człowieka i robota w jednym obszarze roboczym. Oznacza to, że operator i robot mogą wykonywać zadania równolegle, przekazywać sobie elementy, a nawet „dzielić” ten sam stół montażowy. Taki model pracy jest możliwy dzięki połączeniu rozwiązań konstrukcyjnych, programowych i organizacyjnych.
Bezpieczeństwo zapewniają przede wszystkim:
- zaokrąglone kształty oraz brak wystających elementów, które mogłyby powodować urazy przy przypadkowym kontakcie,
- ograniczona masa i prędkość końcówek roboczych, dzięki czemu energia potencjalnego zderzenia jest relatywnie niska,
- wbudowane w napędy czujniki, umożliwiające detekcję kontaktu i natychmiastowe zatrzymanie ruchu,
- konfigurowalne limity prędkości i sił, dostosowywane do typu zadania i oceny ryzyka.
Środowisko pracy z YuMi, dobrze zaprojektowane pod względem ergonomii, pozwala na odciążenie pracowników od najbardziej monotonicznych, uciążliwych lub wymagających nieustannego skupienia czynności. Robot może np. wykonywać ciągłe dołączanie drobnych komponentów, podczas gdy człowiek zajmuje się zadaniami wymagającymi wzrokowej oceny jakości, podejmowania decyzji czy drobnych modyfikacji produktu pod indywidualne zamówienie.
Taki podział zadań wpływa korzystnie na zdrowie pracowników, redukując obciążenia powtarzalne, które mogą prowadzić do schorzeń układu mięśniowo-szkieletowego, np. przy długotrwałym, powtarzalnym montażu. Jednocześnie zmienia to charakter pracy – operator coraz częściej pełni rolę nadzorcy, konfiguratora i kontrolera procesu, a nie jedynie wykonawcy manualnego.
W praktyce wdrażanie YuMi wymaga przeprowadzenia oceny ryzyka oraz odpowiedniego zaprojektowania stanowiska. Niekiedy konieczne jest zastosowanie dodatkowych środków bezpieczeństwa, takich jak ograniczone strefy pracy, systemy wizyjne monitorujące obecność operatora czy kurtyny świetlne działające w określonych trybach. Elastyczność robota pozwala jednak dostosować stopień współpracy do specyfiki procesu i wymogów lokalnych regulacji BHP.
Z ergonomicznego punktu widzenia istotne jest także to, że YuMi może być pozycjonowany na różnych wysokościach i w różnych orientacjach, co umożliwia lepsze dopasowanie do wzrostu i sposobu pracy operatorów. Można go np. zamontować na krawędzi stołu montażowego, w lekkim nachyleniu lub na ramie nad głową, jeśli wymaga tego layout fabryki. Dzięki temu stanowiska można kształtować w sposób dostosowany zarówno do potrzeb procesu, jak i komfortu pracy ludzi.
Integracja z systemami IT, wizją maszynową i Przemysłem 4.0
IRB 14050 YuMi jest projektowany jako element szerszego ekosystemu przemysłowego, w którym kluczową rolę odgrywają integracja danych i komunikacja z innymi urządzeniami. Robot może być połączony z systemami nadrzędnymi, takimi jak MES czy ERP, co umożliwia synchronizację z planem produkcji, raportowanie wykonanych zadań czy gromadzenie danych statystycznych na temat wydajności.
Jedną z najważniejszych funkcji jest integracja z systemami wizyjnymi. Kamera 2D lub 3D zamontowana nad stanowiskiem lub na samym robocie pozwala na:
- rozpoznawanie położenia i orientacji losowo ułożonych części,
- weryfikację poprawności montażu,
- odczytywanie kodów kreskowych i kodów Data Matrix,
- kontrolę obecności i orientacji komponentów.
Takie połączenie robotyki współpracującej i wizji maszynowej jest szczególnie cenne w przemyśle elektronicznym, gdzie różnorodność komponentów i wariantów produktów jest bardzo duża, a manualne przezbrajanie stacji wizyjnej byłoby czasochłonne. Robot może dostosowywać swoje ścieżki ruchu w czasie rzeczywistym, reagując na informacje z kamer, co umożliwia obsługę niewielkich partii produkcyjnych bez konieczności sztywnego pozycjonowania elementów na podajnikach czy tackach.
W kontekście Przemysłu 4.0 ważna jest także możliwość monitorowania stanu technicznego robota i przewidywania konieczności przeglądów. Informacje o czasie pracy osi, liczbie cykli, poziomach obciążenia czy nietypowych drganiach mogą być przetwarzane przez systemy analityczne, które ostrzegają o możliwych awariach zanim do nich dojdzie. Pozwala to planować serwis w dogodnych oknach produkcyjnych, minimalizując przestoje.
YuMi może być również częścią zintegrowanych gniazd produkcyjnych, w których współdziała z innymi robotami, podajnikami automatycznymi, drukarkami 3D, stacjami testowymi i maszynami specjalnymi. W takich układach istotna jest standaryzacja protokołów komunikacyjnych oraz interoperacyjność, które ABB wspiera, udostępniając szereg narzędzi programistycznych i interfejsów komunikacyjnych.
Rozwój oprogramowania i narzędzi cyfrowych wokół IRB 14050 YuMi sprawia, że staje się on coraz bardziej „inteligentnym” elementem systemu produkcyjnego, zdolnym do adaptacji, uczenia się na podstawie danych oraz współpracy z algorytmami sztucznej inteligencji w obszarach takich jak optymalizacja ścieżek czy detekcja anomalii w procesie.
Ciekawostki, przykłady wdrożeń i kierunki rozwoju
YuMi, ze względu na swój nietypowy wygląd i zdolność do delikatnych ruchów, wielokrotnie pojawiał się w przestrzeni medialnej. Jeden z najbardziej znanych przykładów to występ podczas koncertu orkiestry, gdy robot dyrygował muzykami, ilustrując precyzję i płynność swoich ruchów. Choć takie zastosowanie ma charakter pokazowy, dobrze obrazuje możliwości kontroli trajektorii i pracy ramion w skomplikowanych układach czasowych.
W praktycznych zastosowaniach przemysłowych jednymi z pierwszych znanych wdrożeń były linie montażowe produktów elektronicznych dużych globalnych marek, gdzie IRB 14050 YuMi został wykorzystany do montażu i testów układów elektronicznych w zakładach o wysokim stopniu automatyzacji. Dzięki dwuramiennej budowie robot mógł wykonywać zadania zbliżone do pracy ludzkich rąk: jedną ręką podtrzymywał komponent, drugą dokonywał operacji montaży, takich jak wpinanie złącz czy przykręcanie śrub.
W wielu fabrykach YuMi pełni rolę robota „demonstracyjnego” – na jego bazie tworzy się pierwsze pilotażowe stanowiska współpracy człowiek–robot, po czym doświadczenia i standardy z takich projektów są przenoszone na inne linie i inne typy robotów. Pozwala to budować kulturę organizacyjną otwartą na obecność cobotów oraz ułatwia pracownikom adaptację do nowego modelu pracy.
Rozwój rodziny YuMi nie zatrzymał się na modelu IRB 14050. ABB wprowadziło także jednoramienne odmiany robotów współpracujących, umożliwiające stosowanie podobnej filozofii w aplikacjach, w których dwa ramiona nie są niezbędne. Niemniej jednak IRB 14050 pozostaje ikoną początkowego okresu ekspansji cobotów w przemyśle elektronicznym i jedną z najbardziej rozpoznawalnych konstrukcji w tym segmencie rynku.
Jeżeli chodzi o kierunki rozwoju, największy potencjał tkwi w coraz ściślejszej integracji robota z systemami opartymi na sztucznej inteligencji. Już dziś prowadzone są prace nad automatycznym generowaniem ruchów robota na podstawie opisów zadań lub przykładów prezentowanych przez operatora. W połączeniu z uczeniem maszynowym może to w przyszłości skrócić czas wdrażania nowych aplikacji i sprawić, że roboty takie jak YuMi będą jeszcze bardziej dostępne dla małych i średnich przedsiębiorstw, które nie dysponują rozbudowanymi działami inżynierskimi.
Istotnym trendem jest również rosnąca świadomość ekologiczna. Roboty współpracujące są postrzegane jako element umożliwiający efektywniejsze wykorzystanie surowców, redukcję odpadów poprzez stałą jakość montażu oraz lepsze zarządzanie energią. W tym kontekście IRB 14050 YuMi, ze swoim niskim zużyciem energii i przystosowaniem do pracy w gęsto upakowanych liniach montażowych, wpisuje się w dążenia do bardziej zrównoważonej produkcji.
W coraz większej liczbie projektów coboty pełnią także funkcję „interfejsu” między człowiekiem a cyfrowym bliźniakiem linii produkcyjnej. Operator może obserwować pracę YuMi, a następnie w środowisku symulacyjnym wprowadzać zmiany, które po weryfikacji są przenoszone na fizycznego robota. Taka synergia pomiędzy światem wirtualnym i rzeczywistym pozwala na eksperymentowanie z nowymi konfiguracjami procesu bez ryzyka dla bieżącej produkcji.
IRB 14050 YuMi, choć zaprojektowany pierwotnie głównie z myślą o przemyśle elektronicznym, stał się symbolem szerszej zmiany sposobu myślenia o automatyzacji – z naciskiem na współpracę, elastyczność, bezpieczeństwo i integrację cyfrową. Dla wielu firm stanowi pierwszy krok w kierunku budowy fabryk, w których ludzie i roboty pracują ramię w ramię nad tworzeniem produktów o wysokiej wartości dodanej, wykorzystując w pełni potencjał nowoczesnych technologii.





{kind=link}
{kind=link}