Robot współpracujący COBOTTA, opracowany przez japońską firmę Denso, stał się jednym z symboli rosnącej automatyzacji w przemyśle elektronicznym oraz w wielu innych gałęziach gospodarki. Łączy w sobie kompaktową konstrukcję, wysoki poziom bezpieczeństwa i intuicyjne programowanie, dzięki czemu trafia zarówno do zaawansowanych linii produkcyjnych, jak i do laboratoriów badawczych, uczelni oraz małych firm. W przeciwieństwie do klasycznych robotów przemysłowych, COBOTTA został zaprojektowany z myślą o bezpośredniej, bliskiej współpracy z człowiekiem, co otwiera nowe możliwości organizacji pracy, redukuje bariery wejścia w automatyzację i pozwala elastycznie skalować moce produkcyjne.
Charakterystyka i budowa robota COBOTTA
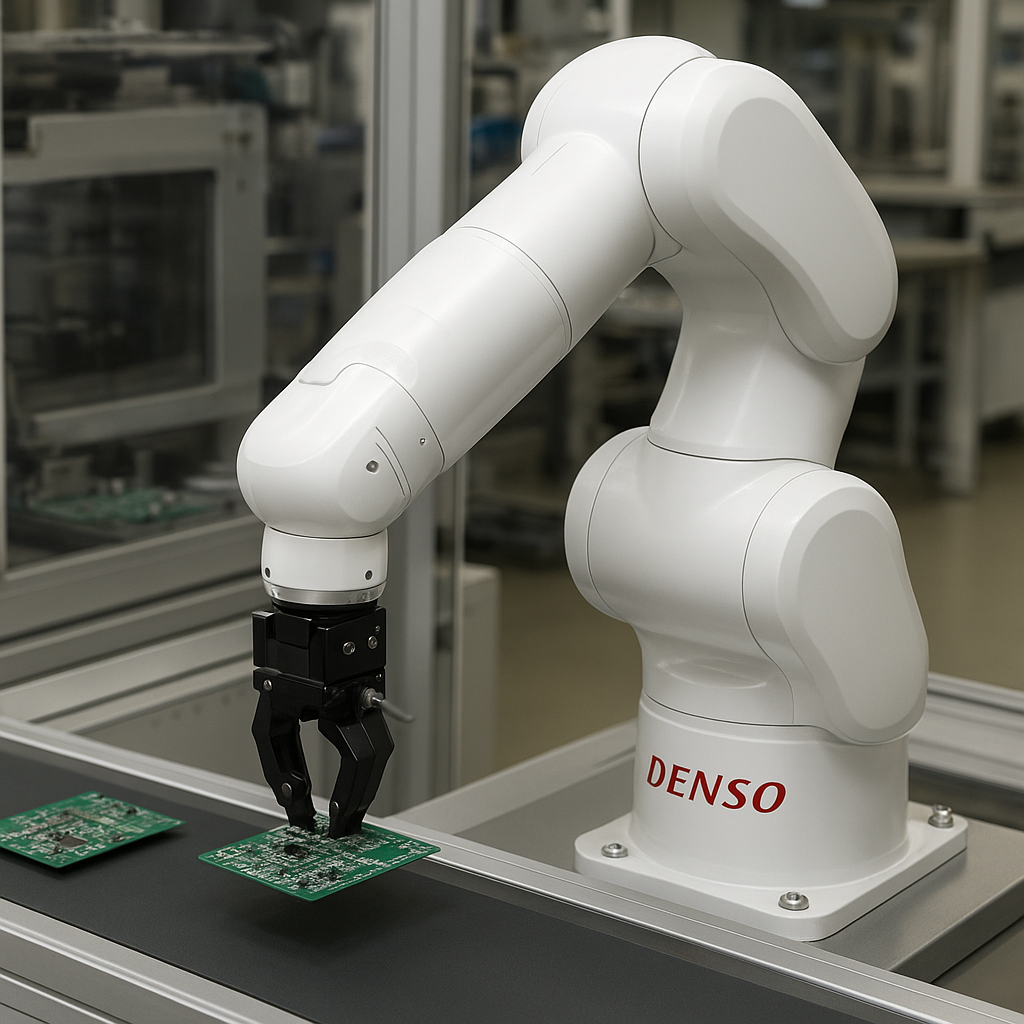
COBOTTA jest kompaktowym, sześcioosiowym robotem współpracującym (tzw. cobotem), który został stworzony głównie z myślą o montażu lekkich komponentów, testowaniu produktów elektronicznych oraz obsłudze urządzeń laboratoryjnych. Jego konstrukcja, oparta na 6 stopniach swobody, umożliwia wykonywanie precyzyjnych ruchów w przestrzeni 3D, przy jednoczesnym zachowaniu niewielkich wymiarów i masy całkowitej. Wyróżnia go zintegrowany kontroler, wbudowane funkcje bezpieczeństwa oraz możliwość szybkiego przenoszenia między stanowiskami.
Najważniejszym aspektem budowy COBOTTY jest połączenie lekkości i sztywności konstrukcji. Robot ma zwykle masę własną rzędu kilku kilogramów (około 4 kg w podstawowej wersji), co sprawia, że jedna osoba może go z łatwością przenieść i zamontować na biurku, stole warsztatowym czy na specjalnej podstawie w linii produkcyjnej. Zasięg roboczy ramienia wynosi około 340 mm, co wystarcza do większości zadań montażu małych podzespołów, obsługi testerów i przenoszenia detali między sąsiadującymi przyrządami.
Udźwig COBOTTY mieści się zwykle w granicach 0,5–0,7 kg, w zależności od konfiguracji i założonych prędkości ruchu. W świecie robotyki przemysłowej nie jest to wartość imponująca, ale w przypadku robotów współpracujących przeznaczonych do zastosowań w przemyśle elektronicznym i precyzyjnym ma to swoje uzasadnienie. Niewielki udźwig oznacza mniejsze siły bezwładności, a tym samym wyższy poziom bezpieczeństwa pracy w otoczeniu ludzi. Dla wielu zadań – takich jak montaż płytek PCB, wkładanie komponentów do gniazd, obsługa przyrządów pomiarowych czy pakowanie małych elementów – udźwig ten jest w pełni wystarczający.
COBOTTA wyróżnia się także zintegrowanymi funkcjami bezpieczeństwa. Zastosowano w nim zaokrąglone krawędzie, brak ostrych elementów konstrukcyjnych, osłonięte przeguby i gładkie powierzchnie. Ramię robota zaprojektowano tak, aby w razie kontaktu z operatorem siły udarowe były jak najmniejsze. Ponadto system sterowania umożliwia ograniczenie prędkości i zakresów pracy, a także definiowanie stref bezpieczeństwa. Dzięki temu COBOTTA może pracować obok człowieka bez stosowania klasycznych wygrodzeń czy klatek bezpieczeństwa, co jest typowe dla tradycyjnych robotów przemysłowych.
Istotnym elementem konstrukcji jest również zintegrowany kontroler. Zamiast osobnej szafy sterowniczej, jak w typowych przemysłowych robotach o dużym udźwigu, COBOTTA posiada elektronikę sterującą wbudowaną w korpus. Ułatwia to instalację, redukuje liczbę kabli i pozwala na stosunkowo prostą integrację z istniejącą infrastrukturą produkcyjną. Do komunikacji z systemami nadrzędnymi wykorzystywane są standardowe interfejsy przemysłowe, takie jak Ethernet, a oprogramowanie wspiera m.in. języki skryptowe oraz dedykowane środowisko programistyczne przygotowane przez Denso.
Wygląd COBOTTY, utrzymany w minimalistycznej stylistyce, nie jest przypadkowy. Jasna kolorystyka, opływowe kształty oraz brak widocznych przewodów mają od razu sugerować użytkownikowi „przyjazny” charakter urządzenia. To ważny element filozofii cobotów: człowiek nie ma czuć dystansu czy obaw przed maszyną, ale traktować ją jako narzędzie pracy zbliżone do innych zaawansowanych urządzeń laboratoryjnych czy produkcyjnych. Ergonomia i prostota obsługi są tu priorytetem.
Producent – Denso i kontekst rozwoju robotyki współpracującej
Za opracowanie COBOTTY odpowiada Denso – japońskie przedsiębiorstwo będące jednym z największych na świecie dostawców części i systemów dla branży motoryzacyjnej. Firma ta od dekad jest również aktywna w dziedzinie automatyzacji i robotyki przemysłowej. Denso Robotics, wyspecjalizowany dział firmy, tworzy roboty przemysłowe o różnej konfiguracji: kartezjańskie, SCARA, sześcioosiowe roboty przegubowe, a także roboty współpracujące, do których należy COBOTTA.
Rozwój COBOTTY wpisuje się w szerszy trend transformacji przemysłu w kierunku koncepcji Przemysłu 4.0, a także w odpowiedź na zmiany demograficzne i gospodarcze – starzenie się społeczeństw, rosnące koszty pracy oraz presję na utrzymanie wysokiej jakości i elastyczności produkcji. Denso dostrzegło rosnące zapotrzebowanie na lekkie, współpracujące roboty, które można łatwo wprowadzać do istniejących zakładów, bez konieczności pełnej przebudowy linii produkcyjnych.
W tradycyjnej robotyce dominowały rozwiązania przeznaczone do zadań o dużych prędkościach, powtarzalności i udźwigu. Wymagały one oddzielenia przestrzeni robota od przestrzeni człowieka, co wiązało się z instalacją wygrodzeń, czujników bezpieczeństwa, kurtyn świetlnych i systemów zatrzymania awaryjnego. Coboty, takie jak COBOTTA, zmieniają ten paradygmat. Zamiast izolować maszynę od człowieka, umożliwiają ich bliską współpracę, w której robot bierze na siebie powtarzalne i męczące czynności, a człowiek koncentruje się na bardziej złożonych zadaniach wymagających kreatywności i kontroli jakości.
Denso włączyło COBOTTĘ do swojej oferty jako odpowiedź zarówno na oczekiwania dużych koncernów produkcyjnych, jak i małych oraz średnich przedsiębiorstw. Te mniejsze firmy często nie dysponują rozbudowanymi działami inżynierii automatyki, a jednocześnie odczuwają presję na zwiększanie wydajności i ograniczanie kosztów. COBOTTA, dzięki prostej konfiguracji i intuicyjnemu środowisku programowania, ma obniżać barierę wejścia w świat automatyzacji nawet dla tych podmiotów, które dotąd nie korzystały z robotów przemysłowych.
W strategii Denso COBOTTA pełni również funkcję „ambasadora technologii” w środowisku akademickim i R&D. Uczelnie techniczne, instytuty badawcze oraz laboratoria wdrożeniowe wykorzystują ten robot jako narzędzie dydaktyczne i eksperymentalne. Studenci i inżynierowie mogą na nim testować algorytmy sterowania, systemy wizyjne, integrację z czujnikami siły czy oprogramowaniem chmurowym. Z punktu widzenia Denso jest to inwestycja w przyszłych użytkowników – inżynierowie, którzy poznają COBOTTĘ na etapie studiów, w przyszłości chętniej rekomendują ją w swoich projektach przemysłowych.
Dane techniczne COBOTTY i możliwości konfiguracji
Dane techniczne COBOTTY różnią się w zależności od konkretnej wersji i generacji, jednak można wskazać kilka charakterystycznych wartości, które oddają jej pozycjonowanie na rynku robotów współpracujących. Niewielka masa, kompaktowe wymiary oraz stosunkowo mały udźwig lokują COBOTTĘ w kategorii cobotów przeznaczonych do prac precyzyjnych, zwłaszcza w przemyśle elektronicznym i laboratoryjnym.
Podstawowe parametry techniczne obejmują:
- Masa robota: około 4 kg, co umożliwia przenoszenie przez jedną osobę.
- Zasięg roboczy: rzędu 340 mm, pozwalający na obsługę stanowiska roboczego typu „biurkowego”.
- Udźwig: zwykle do 0,5–0,7 kg, zależnie od konfiguracji i prędkości.
- Liczba osi: 6 stopni swobody, zapewniających pełną swobodę orientacji narzędzia.
- Powtarzalność pozycjonowania: na poziomie dziesiątych, a nawet setnych części milimetra, co jest istotne przy montażu drobnych komponentów.
- Zasilanie: z reguły niskonapięciowe, przystosowane do pracy w typowym środowisku przemysłowym i laboratoryjnym.
- Stopień ochrony: dostosowany do standardowych warunków produkcyjnych (brak wersji do pracy w strefach zagrożonych wybuchem czy w pełnym zanurzeniu, ale dostępne są rozwiązania chroniące przed pyłem i umiarkowaną wilgotnością).
COBOTTA występuje w różnych wariantach wyposażeniowych, obejmujących m.in. zintegrowany chwytak, moduł wizyjny, przyciski na obudowie, a także możliwość montażu dodatkowych akcesoriów zewnętrznych. Z punktu widzenia integratora ważne jest, że konstrukcja ramienia przewiduje zasilanie i komunikację dla efektora końcowego, co ułatwia montaż chwytaków elektrycznych, pneumatycznych lub specjalistycznych narzędzi (np. wkrętarki, dyspensera kleju, głowicy lutowniczej).
Interfejsy komunikacyjne obejmują typowe protokoły przemysłowe, takie jak Ethernet/IP czy Profinet, a także interfejsy ogólnego przeznaczenia, umożliwiające integrację z komputerami PC, sterownikami PLC czy urządzeniami pomiarowymi. Denso oferuje dedykowane środowisko do programowania COBOTTY, często w formie intuicyjnego interfejsu graficznego, w którym operator może „przeciągać” i łączyć bloki funkcji, definiując sekwencje ruchów oraz logikę sterowania. Dla zaawansowanych użytkowników dostępne są także możliwości programowania skryptowego oraz integracji z zewnętrznymi bibliotekami programistycznymi.
Istotną cechą COBOTTY jest również opcja nauczania przez prowadzenie. Operator może chwycić ramię robota, ręcznie poprowadzić je po żądanej trajektorii, a system zapamiętuje kolejne pozycje i przekształca je w sekwencję ruchów. Ułatwia to szybkie tworzenie prostych programów, np. do przenoszenia detali między dwoma punktami, bez konieczności pisania kodu czy korzystania z zaawansowanych narzędzi programistycznych. Takie podejście przyspiesza wdrożenie robota nawet w zakładach, gdzie nie ma wykwalifikowanych programistów robotów.
Zastosowania COBOTTY w przemyśle elektronicznym
Najbardziej naturalnym środowiskiem pracy COBOTTY jest przemysł elektroniczny, w którym operuje się na niewielkich, delikatnych komponentach, wymagających precyzyjnego pozycjonowania i delikatnego chwytu. COBOTTA może wykonywać szereg zadań, od prostych czynności manipulacyjnych, po skomplikowane sekwencje montażowe i testowe, współpracując przy tym bezpośrednio z operatorami.
Jednym z typowych zastosowań jest montaż płytek drukowanych (PCB). COBOTTA może pobierać komponenty z podajników, tacek czy taśm i umieszczać je w wyznaczonych miejscach na płytce, współpracując lub uzupełniając automaty typu pick-and-place o bardzo dużej wydajności. Może także obsługiwać przyrządy testujące – wkładać i wyjmować płytki do gniazd testowych, zaciskać złącza, uruchamiać sekwencję testową na komputerze sterującym oraz odkładać gotowe wyroby do odpowiednich pojemników.
COBOTTA znajduje również zastosowanie przy montażu końcowym urządzeń elektronicznych, takich jak smartfony, tablety, moduły komunikacyjne czy urządzenia IoT. Delikatny chwyt i możliwość pracy w bliskiej odległości od człowieka pozwalają wykorzystać robota do zadań, w których człowiek wykonuje kontrolę wzrokową, dokręca śruby czy dokonuje finalnej inspekcji, a robot zajmuje się powtarzalnym podawaniem komponentów, zamykaniem obudów, wstępnym dokręcaniem elementów z określonym momentem czy nanoszeniem niewielkich ilości kleju lub past przewodzących.
W sektorze elektronicznym ważne są także testy funkcjonalne, w których COBOTTA może automatycznie podłączać urządzenia do stanowisk testowych – wtykać wtyczki USB, HDMI, złącza zasilające, złącza antenowe – oraz obsługiwać przyciski, przełączniki i elementy dotykowe. Dzięki temu proces testowania staje się powtarzalny, wolny od błędów wynikających z rutyny operatora, a obciążenie pracowników monotonną pracą jest znacząco mniejsze.
Ważnym atutem COBOTTY w przemyśle elektronicznym jest możliwość łatwej rekonfiguracji stanowiska. Produkcja elektroniki charakteryzuje się krótkimi seriami, częstymi zmianami modeli, szybkim cyklem wprowadzania nowych urządzeń na rynek. COBOTTA, dzięki kompaktowej budowie i prostemu programowaniu, może być stosunkowo szybko przeprogramowana do obsługi innego produktu lub innego przyrządu testowego, bez czasochłonnych zmian mechanicznych. To zwiększa elastyczność całej linii produkcyjnej i pozwala lepiej reagować na zmiany popytu.
Inne branże przemysłu i obszary zastosowań
Choć COBOTTA została zaprojektowana z myślą o elektronice, jej zastosowania są znacznie szersze. Robot ten sprawdza się także w branży farmaceutycznej, medycznej, kosmetycznej, w laboratoriach chemicznych, a także w przemyśle precyzyjnym i w środowiskach badawczo-rozwojowych. W każdej z tych dziedzin istotne są: niewielkie rozmiary, duża powtarzalność ruchów oraz wysoki poziom bezpieczeństwa w kontakcie z człowiekiem.
W farmacji i kosmetyce COBOTTA może być wykorzystywana do dozowania niewielkich ilości płynów, obsługi probówek, pipet, mikro-płytek laboratoryjnych, zakręcania niewielkich butelek czy fiol. W połączeniu z szafami laminarno–bezpiecznymi, odpowiednią zabudową i procedurami czystości, robot może realizować zadania w środowiskach o podwyższonych wymaganiach higienicznych. Dzięki wysokiej precyzji ruchów oraz stabilnym parametrom pracy COBOTTA redukuje ryzyko błędów wynikających ze zmęczenia czy nieuwagi operatora.
W laboratoriach badawczych COBOTTA jest często stosowana jako narzędzie automatyzacji powtarzalnych zadań, takich jak przenoszenie próbek między urządzeniami analitycznymi, ładowanie i rozładowywanie inkubatorów, czy obsługa spektrometrów i chromatografów. Jej obecność pozwala naukowcom skoncentrować się na interpretacji wyników, projektowaniu eksperymentów oraz analizie danych, zamiast poświęcać czas na ręczne wykonywanie setek identycznych czynności.
W przemyśle precyzyjnym, np. w produkcji zegarków, instrumentów optycznych czy miniaturowych mechanizmów, COBOTTA może wykonywać zadania montażu, precyzyjnej manipulacji mikromechanizmami, nakładania smarów czy kalibracji. W takich zastosowaniach kluczowe jest połączenie dokładności oraz delikatności ruchów, a także możliwość ścisłej współpracy z wykwalifikowanymi rzemieślnikami lub technikami, którzy na bieżąco nadzorują efekty pracy robota.
Należy też wspomnieć o edukacji i szkoleniach. COBOTTA jest często wybierana przez uczelnie i ośrodki szkoleniowe jako narzędzie do nauki programowania robotów, projektowania aplikacji z zakresu automatyki oraz integracji systemów cyber–fizycznych. Studenci mogą ćwiczyć na realnym robocie, symulować procesy montażu, testowania czy kontroli jakości, zdobywając praktyczne umiejętności poszukiwane na rynku pracy. W tym kontekście COBOTTA pełni rolę pomostu pomiędzy teorią a praktyką – uczy inżynierów myślenia procesowego i projektowego, uwzględniającego zarówno aspekty techniczne, jak i organizacyjne.
Znaczenie gospodarcze i wpływ na rynek pracy
Znaczenie gospodarcze COBOTTY wynika przede wszystkim z jej roli jako narzędzia ułatwiającego automatyzację w sektorach, które dotąd były relatywnie słabo zmechanizowane, lub w których bariera wejścia w klasyczną robotykę przemysłową była zbyt wysoka. Małe i średnie przedsiębiorstwa, laboratoria, zakłady montażu elektroniki i precyzyjnej optyki często nie były w stanie inwestować w duże roboty wymagające specjalistycznej infrastruktury. COBOTTA, jako kompaktowy i „biurkowy” robot współpracujący, istotnie obniża próg inwestycji, zarówno w sensie finansowym, jak i organizacyjnym.
Dzięki temu firmy mogą wprowadzać automatyzację etapami, rozpoczynając od pojedynczych stanowisk roboczych, na których COBOTTA przejmuje najbardziej powtarzalne i obciążające zadania. Przykładowo, w małym zakładzie montażu elektroniki robot może początkowo obsługiwać jedynie stanowisko testów funkcjonalnych, podczas gdy reszta procesu jest wykonywana ręcznie. Z czasem, po pozytywnych doświadczeniach i ocenie zwrotu z inwestycji, przedsiębiorstwo może rozważyć rozbudowę parku robotów, integrację stanowisk w większy system i automatyzację kolejnych etapów produkcji.
Wpływ COBOTTY na rynek pracy jest złożony. Z jednej strony pojawia się obawa o redukcję zatrudnienia na skutek zastępowania ludzi przez roboty. Z drugiej jednak strony doświadczenia wielu firm pokazują, że coboty często nie eliminują miejsc pracy, lecz zmieniają ich charakter. Zamiast wykonywać monotonne czynności, operatorzy stają się nadzorcami stanowisk zrobotyzowanych, zajmują się ustawianiem parametrów, kontrolą jakości, logistyką materiałową oraz wykonywaniem zadań wymagających elastyczności człowieka.
W praktyce COBOTTA może przyczynić się do poprawy jakości miejsc pracy poprzez odciążenie pracowników od zadań uciążliwych fizycznie i monotonnych psychicznie. Przenoszenie setek płytek PCB, ciągłe podłączanie i odłączanie wtyczek, powtarzalne ruchy nadgarstka – to czynności prowadzące do zmęczenia, kontuzji, a także błędów produkcyjnych. Przejęcie tych działań przez robota zmniejsza absencję chorobową, podnosi jakość produkcji i pozwala lepiej wykorzystać potencjał ludzki w obszarach, w których człowiek wciąż jest niezastąpiony, jak ocena nietypowych przypadków, reagowanie na nieplanowane zdarzenia czy wprowadzanie usprawnień procesów.
W wymiarze makroekonomicznym rozpowszechnienie takich rozwiązań jak COBOTTA przyczynia się do wzrostu produktywności sektorów wysoko przetworzonych, takich jak elektronika, farmacja czy technologie medyczne. Podniesienie wydajności przy jednoczesnym utrzymaniu lub poprawie jakości wyrobów zwiększa konkurencyjność przedsiębiorstw na rynkach międzynarodowych. Dotyczy to także krajów o relatywnie wysokich kosztach pracy – automatyzacja stanowi tam jeden z głównych sposobów utrzymania produkcji lokalnej, zamiast przenoszenia jej do państw o niższych płacach.
Nie bez znaczenia jest także aspekt innowacyjności. COBOTTA, jako zaawansowany technologicznie produkt, stymuluje rozwój ekosystemu dostawców oprogramowania, integratorów systemów, producentów chwytaków, czujników i innych komponentów, z którymi robot może współpracować. Tworzy to nowe miejsca pracy w obszarach o wysokiej wartości dodanej – inżynierii oprogramowania, mechatronice, projektowaniu systemów wizyjnych. W ten sposób wpływ gospodarczy COBOTTY nie ogranicza się do samego urządzenia, ale obejmuje całe otoczenie technologiczne.
Bezpieczeństwo, normy i aspekty ergonomiczne
Roboty współpracujące, takie jak COBOTTA, funkcjonują w ramach rygorystycznych norm bezpieczeństwa, które określają dopuszczalne poziomy sił, prędkości oraz warunki pracy w bezpośrednim sąsiedztwie człowieka. Konstrukcja COBOTTY uwzględnia te wymagania poprzez odpowiedni dobór materiałów, kształtów oraz mechanizmów kontroli ruchu. Zaokrąglone powierzchnie, brak wystających krawędzi oraz ograniczenie masy i prędkości minimalizują ryzyko poważnych urazów w razie kontaktu z operatorem.
System sterowania umożliwia implementację funkcji takich jak monitorowanie prędkości i separacji (Speed and Separation Monitoring), ograniczenie mocy i siły (Power and Force Limiting), czy definiowanie bezpiecznych przestrzeni roboczych. W praktyce oznacza to, że COBOTTA może zwalniać, gdy człowiek zbliża się do określonej strefy, a w razie bezpośredniego kontaktu zatrzymywać się w sposób kontrolowany. Dla użytkownika ważne jest również istnienie przejrzystych procedur uruchamiania, zatrzymywania awaryjnego oraz diagnostyki usterek.
Ergonomia stanowisk pracy z COBOTTĄ ma ogromne znaczenie dla efektywności całego systemu. Umieszczenie robota w odpowiedniej odległości od operatora, tak aby zakres jego ruchów był optymalnie wykorzystany, zaprojektowanie wygodnych stref odkładczych, pojemników na detale, paneli operatorskich – wszystko to wpływa na płynność współpracy człowiek–robot. Dobrze zaprojektowane stanowisko pozwala jednemu operatorowi nadzorować pracę kilku robotów lub łączyć czynności manualne z zadaniami zrobotyzowanymi w sposób płynny i bezkonfliktowy.
W kontekście bezpieczeństwa i ergonomii niezwykle ważne jest także odpowiednie przeszkolenie pracowników. COBOTTA, choć zaprojektowana jako urządzenie „przyjazne” użytkownikowi, jest wciąż maszyną zdolną do wykonywania szybkich ruchów i przenoszenia ładunków. Operatorzy muszą znać podstawowe zasady bezpiecznej współpracy, rozumieć sygnały świetlne i dźwiękowe, potrafić przeprowadzać podstawową diagnostykę oraz wiedzieć, kiedy i jak reagować w razie nietypowego zachowania robota.
Integracja z systemami Przemysłu 4.0 i przyszłe kierunki rozwoju
COBOTTA została zaprojektowana z myślą o integracji z koncepcją Przemysłu 4.0, w której kluczową rolę odgrywa wymiana danych, analiza w czasie rzeczywistym oraz elastyczne zarządzanie zasobami. Robot ten może być elementem szerszego systemu cyber–fizycznego, w którym urządzenia produkcyjne, magazynowe i transportowe komunikują się ze sobą, a decyzje o planowaniu i realizacji zadań podejmowane są w oparciu o bieżące dane produkcyjne.
Dzięki standardowym interfejsom komunikacyjnym COBOTTA może być włączona do systemów MES, ERP czy chmurowych platform analitycznych. Dane o liczbie wykonanych cykli, czasie pracy, występujących alarmach i przestojach, a także informacje o jakości produktów mogą być gromadzone i analizowane w celu optymalizacji procesów. W połączeniu z algorytmami uczenia maszynowego istnieje możliwość przewidywania awarii, optymalizowania ścieżek ruchu czy adaptacyjnego dostosowywania parametrów pracy robota do bieżących warunków produkcyjnych.
Perspektywy rozwoju COBOTTY i podobnych robotów współpracujących obejmują dalsze zwiększanie inteligencji oraz autonomii. Rozwój systemów wizyjnych wysokiej rozdzielczości, czujników siły i momentu, a także algorytmów sztucznej inteligencji pozwoli robotom na bardziej „świadome” reagowanie na otoczenie. Zamiast wykonywać z góry zaprogramowane sekwencje ruchów, coboty będą w coraz większym stopniu podejmować decyzje na podstawie aktualnych danych sensorycznych, np. dopasowując siłę chwytu do rodzaju materiału, rozpoznając nieprawidłowo ułożone elementy czy reagując na nieplanowane przeszkody.
Dla przemysłu elektronicznego szczególnie istotny będzie rozwój funkcji umożliwiających adaptację do szybkich zmian produktów. Możliwość rozpoznawania nowych modeli urządzeń, automatycznego uczenia się ich geometrii i punktów chwytu oraz elastycznego dostosowywania programów montażowych pozwoli skrócić czas przezbrojeń i jeszcze lepiej wykorzystać potencjał automatyzacji w środowiskach produkcyjnych o wysokiej zmienności asortymentu.
COBOTTA już dziś stanowi przykład, jak połączenie kompaktowej konstrukcji, bezpieczeństwa współpracy i zaawansowanego oprogramowania może zmienić sposób organizacji pracy w zakładach przemysłowych, laboratoriach i centrach badawczych. Jej rozwój i dalsza integracja z ekosystemem Przemysłu 4.0 będzie wpływać na kształtowanie nowych modeli biznesowych, w których granica między pracą człowieka a działaniem maszyn staje się coraz bardziej płynna, a automatyzacja przestaje być domeną wyłącznie wielkich korporacji.








{kind=link}
{kind=link}