Rosnące znaczenie energetyki jądrowej w miksie energetycznym wielu państw wymusza nie tylko budowę nowych bloków, ale przede wszystkim utrzymanie istniejących elektrowni na najwyższym poziomie bezpieczeństwa i niezawodności. Kluczowym elementem tego procesu są regularne przeglądy, inspekcje i modernizacje, które pozwalają na wczesne wykrywanie uszkodzeń, przedłużanie czasu eksploatacji urządzeń oraz ograniczanie ryzyka poważnych awarii. Coraz większą rolę w tym obszarze odgrywają wyspecjalizowane systemy robotyczne, zdolne do pracy w warunkach niedostępnych lub skrajnie niebezpiecznych dla człowieka. Wykorzystanie robotów w przeglądach elektrowni atomowych staje się jednym z filarów współczesnej kultury bezpieczeństwa jądrowego, łącząc innowacje technologiczne z rygorystycznymi wymaganiami regulacyjnymi oraz rosnącymi oczekiwaniami społecznymi wobec sektora energii.
Ewolucja inspekcji w energetyce jądrowej: od ręcznych przeglądów do systemów zrobotyzowanych
Początki energetyki jądrowej opierały się głównie na tradycyjnych, ręcznych metodach inspekcji, w których kluczową rolę odgrywał wysoko wyspecjalizowany personel techniczny. W praktyce oznaczało to wchodzenie ludzi do ograniczonych przestrzeni, pracę w pobliżu elementów o podwyższonym poziomie promieniowania oraz liczne operacje montażowo-demontażowe konieczne tylko po to, by uzyskać dostęp do kontrolowanych podzespołów. Metody te były skuteczne, ale kosztowne czasowo, a przede wszystkim wiązały się z narażeniem personelu na dawki promieniowania i różnego rodzaju zagrożenia procesowe, od wysokiej temperatury po ryzyko skażenia.
Wraz z dojrzewaniem technologii jądrowych oraz zaostrzaniem norm bezpieczeństwa zaczęto poszukiwać sposobów na ograniczenie udziału człowieka w najbardziej niebezpiecznych i uciążliwych czynnościach. Pierwszymi krokami było wdrażanie systemów zdalnego monitoringu, takich jak kamery w obszarach promieniotwórczych czy czujniki online mierzące temperaturę, ciśnienie, przepływy oraz poziom aktywności promieniotwórczej w kluczowych punktach instalacji. To jednak wciąż nie wystarczało, ponieważ wiele elementów wymagało wizualnej inspekcji, badań nieniszczących czy bezpośredniego pobierania próbek materiałowych.
Kolejny etap ewolucji otworzyły mobilne systemy zdalnie sterowane, początkowo bardzo proste – przypominające zminiaturyzowane pojazdy gąsienicowe wyposażone w kamerę, reflektory i podstawowe czujniki. Umożliwiały one wjazd do pomieszczeń o podwyższonym promieniowaniu lub do tuneli kablowych i kanałów technologicznych, minimalizując konieczność wejścia personelu. Z czasem zaczęto do nich dodawać manipulatorów, głowice pomiarowe i zaawansowane systemy pozycjonowania, co przekształciło je w efektywne narzędzia utrzymania ruchu.
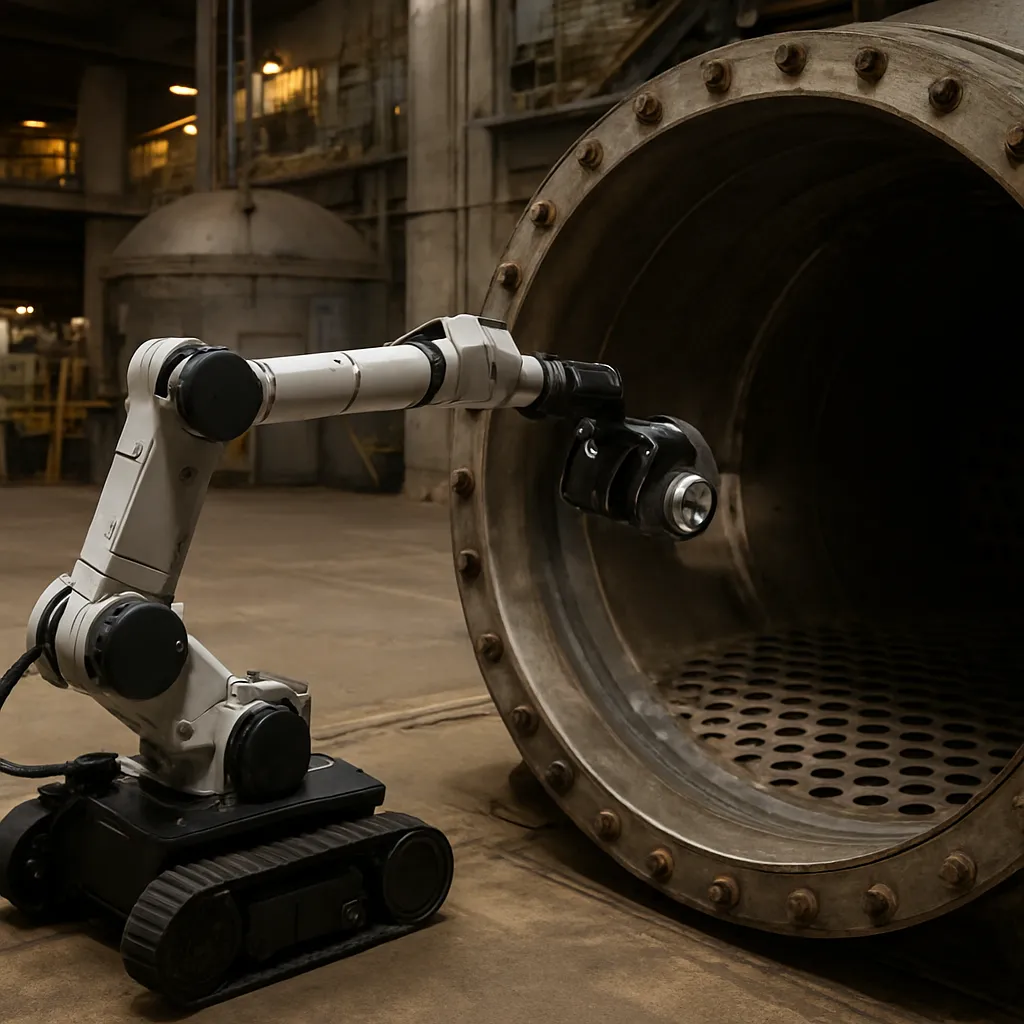
Równolegle rozwijały się specjalistyczne roboty do inspekcji wnętrza rurociągów, zbiorników czy wymienników ciepła. W energetyce jądrowej szczególne znaczenie zyskały roboty przeznaczone do badań elementów obiegu pierwotnego, w tym korpusu reaktora, króćców przyłączeniowych oraz spoin rurociągów. To właśnie tam awaria może mieć najbardziej dotkliwe konsekwencje, a dostęp dla człowieka jest skrajnie ograniczony zarówno przez względy konstrukcyjne, jak i radiologiczne.
Dzisiejszy obraz inspekcji w elektrowniach atomowych to złożony ekosystem technologiczny, w którym współpracują klasyczne metody nadzoru, zaawansowane systemy pomiarowe online oraz różnorodne platformy robotyczne – od lądowych, przez pływające w wodzie, aż po latające bezzałogowce stosowane do kontroli obiektów zewnętrznych. Transformacja ta nie tylko zwiększyła poziom bezpieczeństwa, ale również umożliwiła regularne pozyskiwanie danych o wysokiej rozdzielczości, które stały się podstawą cyfrowych bliźniaków urządzeń oraz predykcyjnego utrzymania ruchu.
Typy robotów stosowanych w przeglądach elektrowni atomowych i ich kluczowe zastosowania
Różnorodność zadań inspekcyjnych w elektrowniach jądrowych przekłada się bezpośrednio na bogactwo konstrukcji robotów. Każda z nich jest projektowana z myślą o konkretnym środowisku pracy, poziomie promieniowania, sposobie poruszania się oraz typie wykonywanych badań. W praktyce wyróżnić można kilka głównych kategorii robotów, które stały się standardem w nowoczesnych programach przeglądów.
Roboty lądowe do inspekcji pomieszczeń i stref kontrolowanych
Najbardziej rozpoznawalne są mobilne roboty lądowe, poruszające się na kołach lub gąsienicach, zdolne do pracy na różnych typach powierzchni i pokonywania przeszkód, takich jak progi, schody czy nierówności podłogi. Ich podstawowym zadaniem jest wykonywanie inspekcji wizualnych przy użyciu wysokiej rozdzielczości kamer, często w konfiguracji 360°, oraz rejestracja danych z szerokiego zestawu czujników środowiskowych.
Tego typu systemy stosuje się m.in. do:
- regularnego sprawdzania stanu korytarzy kablowych, kanałów technicznych i pomieszczeń pomocniczych,
- lokalizacji wycieków, śladów korozji czy uszkodzeń mechanicznych elementów konstrukcyjnych,
- wstępnej oceny warunków radiologicznych w strefach, do których planowane jest wejście personelu,
- monitorowania trudno dostępnych przestrzeni pod podestami, konstrukcjami wsporczymi i za osłonami.
Wyposażenie takich robotów obejmuje zwykle systemy nawigacji inercyjnej, skanery laserowe do mapowania przestrzeni, czujniki gazów, mikrofony do wykrywania nieszczelności oraz detektory promieniowania gamma. Dzięki temu możliwe jest tworzenie szczegółowych map radiologicznych obiektu, co pozwala na optymalizację tras wejścia dla ekip serwisowych oraz minimalizację uzyskiwanych przez nich dawek.
Roboty do inspekcji rurociągów i zbiorników
Obszarem o szczególnym znaczeniu z punktu widzenia niezawodności jest sieć rurociągów wysokociśnieniowych i zbiorników ciśnieniowych pracujących w układzie pierwotnym oraz wtórnym elektrowni jądrowej. Tu dominują wyspecjalizowane roboty przeznaczone do tzw. inline inspection, czyli badań od wewnątrz. Mogą to być niewielkie roboty pełzające, wykorzystujące magnetyczne przyssawki, gąsienice lub rozwijane ramiona rozporowe, które utrzymują je w osi rurociągu.
Najczęściej integrowane są z nimi głowice badań nieniszczących, takich jak ultradźwiękowe badania grubości ścian, prądy wirowe do wykrywania pęknięć powierzchniowych, czy techniki radiograficzne. Dane pomiarowe zbierane podczas jednej kampanii inspekcyjnej pozwalają na szczegółowe profilowanie stanu rur, wykrywanie wżerów korozyjnych, odkształceń oraz wczesnych faz pęknięć zmęczeniowych. Ma to kluczowe znaczenie dla planowania wymian i napraw, zanim dojdzie do rozwoju uszkodzeń zagrażających integralności barier bezpieczeństwa.
Analogicznie działa grupa robotów przeznaczonych do inspekcji zbiorników, w tym basenów wypalonego paliwa czy zbiorników kondensatu. Tu wykorzystywane są często platformy pływające lub podwodne, wyposażone w sonary, kamery o dużej czułości, oświetlenie dostosowane do pracy w mętnej wodzie oraz systemy lokalizacji przestrzennej. Pozwalają one nie tylko na ocenę stanu powłok ochronnych, ale również na lokalizację ewentualnych obiektów obcych, osadów czy uszkodzeń mechanicznych.
Roboty reaktorowe i narzędzia do badań elementów kluczowych
Najbardziej zaawansowaną i wrażliwą kategorią są roboty przeznaczone do pracy bezpośrednio w strefie reaktora, zarówno w czasie postoju z wyłączonym rdzeniem, jak i w okresach niskiej mocy. Obejmują one złożone systemy manipulatorów, platformy montowane na pokrywach zbiorników reaktora oraz specjalne urządzenia wprowadzane do wnętrza korpusu przez dedykowane króćce.
Tego typu roboty wykonują m.in.:
- badania spoin i powierzchni wewnętrznych zbiornika reaktora metodami ultradźwiękowymi i wizualnymi,
- inspekcje kanałów paliwowych, prowadnic prętów regulacyjnych i elementów konstrukcyjnych rdzenia,
- monitorowanie stanu powłok antykorozyjnych, powłok osłonowych oraz elementów mocujących,
- pobieranie próbek materiałowych z wybranych obszarów, np. do badań zmian własności stali pod wpływem napromieniowania.
Z uwagi na ekstremalne warunki – wysoki poziom promieniowania, ograniczoną przestrzeń, obecność wody borowanej i skomplikowaną geometrię – roboty reaktorowe muszą wykazywać się wysoką odpornością, precyzją pozycjonowania oraz niezawodnością działania. Ich awaria w trakcie operacji mogłaby utrudnić lub uniemożliwić ponowne uruchomienie bloku, dlatego projektuje się je z dużym zapasem bezpieczeństwa, stosując redundantne systemy sterowania i zaawansowane procedury odzyskiwania urządzenia w razie problemów.
Roboty latające w obsłudze infrastruktury zewnętrznej i obiektów pomocniczych
W ostatnich latach coraz powszechniej stosowane są również bezzałogowe statki powietrzne, czyli drony, wykorzystywane do inspekcji dachów, kominów, chłodni kominowych, ogrodzeń, linii elektroenergetycznych oraz innych elementów infrastruktury zewnętrznej. Wyposażone w kamery dzienne i termowizyjne, a także w lidar, umożliwiają szybkie pozyskiwanie danych z dużych obszarów bez konieczności budowy rusztowań czy stosowania podnośników.
Choć w strefach o wysokim promieniowaniu ich zastosowanie jest ograniczone przez wrażliwość elektroniki, w szerokim otoczeniu elektrowni stanowią cenne narzędzie do monitoringu stanu obiektów oraz wykrywania potencjalnych anomalii, takich jak ubytki w izolacji, nieszczelności dachów czy przegrzewające się elementy systemów elektrycznych. W niektórych krajach rozważa się również wykorzystanie dronów do wspomagania planów ewakuacyjnych i ćwiczeń z zakresu reagowania kryzysowego.
Korzyści, wyzwania i przyszłe kierunki rozwoju robotyzacji przeglądów w energetyce jądrowej
Upowszechnienie robotów w przeglądach elektrowni atomowych przynosi szereg korzyści, które wykraczają daleko poza sam aspekt ograniczania narażenia personelu na promieniowanie. Stanowią one istotny element strategii wydłużania okresu eksploatacji bloków, optymalizacji kosztów utrzymania oraz budowania zaufania społecznego do technologii jądrowej jako źródła stabilnej, niskoemisyjnej energii.
Podniesienie poziomu bezpieczeństwa i redukcja dawek promieniowania
Jednym z podstawowych celów robotyzacji przeglądów jest minimalizacja kontaktu człowieka z obszarami o podwyższonym poziomie promieniowania jonizującego. Zastosowanie robotów pozwala na wykonywanie wielu czynności kontrolnych, diagnostycznych i pomiarowych zdalnie, co wprost przekłada się na redukcję łącznej dawki kolektywnej otrzymywanej przez personel w trakcie kampanii remontowych i przeglądowych.
Dodatkowo, możliwość częstszej i bardziej szczegółowej inspekcji newralgicznych elementów, takich jak spoiny rurociągów obiegu pierwotnego, wewnętrzne powierzchnie zbiorników czy elementy konstrukcyjne rdzenia, zwiększa prawdopodobieństwo wykrycia usterek w ich wczesnych stadiach. W efekcie rośnie margines bezpieczeństwa, a potencjalne nieprawidłowości mogą być korygowane w kontrolowanych warunkach, zanim przekształcą się w poważne zdarzenia.
Efektywność ekonomiczna i skracanie czasów postoju
Przeglądy w elektrowniach jądrowych wiążą się ze znacznymi kosztami wynikającymi nie tylko z samej pracy serwisowej, ale także z przestojów w produkcji energii. Zastosowanie systemów robotycznych umożliwia usprawnienie logistyki prac, równoległe wykonywanie wielu zadań oraz ograniczenie konieczności demontażu dużych struktur tylko po to, by uzyskać dostęp do badanego obszaru.
Roboty, dzięki swojej mobilności i możliwościom integracji wielu czujników w jednym przejściu, są w stanie zgromadzić komplet danych szybciej, niż byłoby to możliwe w tradycyjny sposób. Zmniejsza to łączny czas postoju bloku, co przekłada się na wymierne korzyści finansowe dla operatora. Ponadto, wysoka powtarzalność i precyzja pomiarów sprzyja lepszemu planowaniu remontów i modernizacji w ujęciu wieloletnim.
Integracja danych z systemami cyfrowymi i predykcyjne utrzymanie ruchu
Nowoczesne roboty inspekcyjne są projektowane jako element szerszego ekosystemu cyfrowego, funkcjonującego w ramach koncepcji przemysłu 4.0. Dane z kamer, czujników i głowic pomiarowych są rejestrowane, geolokalizowane i automatycznie przesyłane do centralnych systemów analitycznych. Umożliwia to tworzenie trójwymiarowych modeli obiektu, cyfrowych bliźniaków urządzeń oraz baz danych, w których można śledzić ewolucję konkretnych nieprawidłowości w czasie.
Taki sposób pracy otwiera drogę do predykcyjnego utrzymania ruchu, w którym decyzje o naprawie, wymianie lub modyfikacji elementów nie opierają się wyłącznie na sztywnych harmonogramach, ale na faktycznym stanie technicznym wynikającym z analiz trendów uszkodzeń. Dzięki temu możliwe jest bardziej racjonalne wykorzystanie zasobów, lepsze planowanie budżetów remontowych oraz ograniczenie ryzyka nieplanowanych wyłączeń.
W tym kontekście szczególnie istotne staje się wykorzystanie algorytmów sztucznej inteligencji i uczenia maszynowego, które potrafią analizować ogromne zbiory danych obrazowych i pomiarowych. Systemy te mogą automatycznie wskazywać anomalie, klasyfikować typy uszkodzeń oraz sugerować priorytety działań serwisowych. Połączenie robotów inspekcyjnych z inteligentnymi narzędziami analitycznymi stanowi fundament przyszłej, jeszcze bardziej zautomatyzowanej diagnostyki w energetyce jądrowej.
Wyzwania technologiczne, regulacyjne i organizacyjne
Mimo licznych zalet, szerokie wdrożenie robotów w przeglądach elektrowni atomowych napotyka także na istotne wyzwania. Pierwszym z nich jest odporność komponentów elektronicznych i mechanicznych na działanie promieniowania jonizującego, wysokiej temperatury oraz agresywnych środowisk chemicznych. Konieczność stosowania specjalistycznych materiałów i technologii hartowania radiacyjnego podnosi koszty i wydłuża czas rozwoju nowych rozwiązań.
Kolejnym aspektem są wymagania regulacyjne, które w sektorze jądrowym są wyjątkowo rygorystyczne. Każde nowe urządzenie wprowadzane do obszarów kluczowych z punktu widzenia bezpieczeństwa musi przejść szczegółowe procesy kwalifikacji, certyfikacji oraz oceny wpływu na istniejące systemy. Dotyczy to nie tylko samych robotów, ale także oprogramowania sterującego, które musi spełniać wymagania w zakresie cyberbezpieczeństwa i niezawodności.
Wyzwanie stanowią także kwestie organizacyjne i kompetencyjne. Zastąpienie części tradycyjnych prac inspekcyjnych operacjami zrobotyzowanymi wymaga przeszkolenia personelu, rozwoju nowych specjalizacji oraz modyfikacji istniejących procedur eksploatacyjnych. Konieczne jest opracowanie standardów planowania misji robotów, oceny ryzyka, postępowania w razie awarii urządzeń oraz integracji ich pracy z zadaniami wykonywanymi przez ludzi.
Wreszcie, w obszarze społecznym pojawia się pytanie o akceptację rosnącego poziomu automatyzacji i zaufanie do systemów technicznych. Operatorzy elektrowni muszą dbać o transparentną komunikację z regulatorami, społecznościami lokalnymi i opinią publiczną, pokazując, że robotyzacja przeglądów nie jest próbą obniżenia standardów nadzoru, lecz narzędziem ich dalszego podnoszenia poprzez lepsze wykorzystanie zasobów ludzkich i technologicznych.
Przyszłe kierunki rozwoju robotów w przeglądach elektrowni atomowych
Rozwój technologii robotycznych w energetyce jądrowej będzie w nadchodzących latach kształtowany przez kilka kluczowych trendów. Po pierwsze, można oczekiwać dalszej miniaturyzacji urządzeń, co umożliwi dostęp do jeszcze węższych przestrzeni i bardziej skomplikowanych struktur wewnętrznych. Jednocześnie rosnąć będzie poziom autonomii robotów – od prostych funkcji unikania kolizji po zdolność samodzielnego planowania trasy, identyfikacji obiektów i podejmowania decyzji w oparciu o dane z czujników.
Po drugie, coraz większą rolę odegra integracja systemów robotycznych z wirtualną i rozszerzoną rzeczywistością. Operatorzy będą mogli sterować robotami, obserwując jednocześnie cyfrowe odwzorowanie obiektu, nakładające na obraz rzeczywisty dodatkowe informacje o badanych elementach, ich historii serwisowej czy obowiązujących parametrach granicznych. Takie podejście ułatwi podejmowanie decyzji i skróci czas analizy wyników inspekcji.
Po trzecie, oczekiwany jest wzrost znaczenia współpracy między robotami różnych typów. Przykładowo, robot lądowy może pełnić rolę mobilnej stacji bazowej, z której startują mniejsze jednostki kroczące lub pływające, realizujące wyspecjalizowane zadania w wąskich kanałach czy wnętrzach zbiorników. Tego rodzaju systemy wieloagentowe zwiększą elastyczność działań i pozwolą lepiej dostosować konfigurację sprzętu do konkretnego scenariusza przeglądowego.
Silnie rozwijanym obszarem będzie także wykorzystanie metod uczenia maszynowego, nie tylko do analizy danych, ale również do optymalizacji samych misji inspekcyjnych. Algorytmy będą w stanie przewidywać najbardziej prawdopodobne miejsca występowania uszkodzeń na podstawie historii eksploatacji, warunków pracy i wcześniejszych rezultatów badań. W efekcie roboty będą kierowane najpierw do najbardziej krytycznych obszarów, co zapewni większą skuteczność całego procesu i lepsze wykorzystanie dostępnego czasu postoju.
Istotnym kierunkiem pozostaje również zwiększenie odporności materiałów i komponentów elektronicznych na promieniowanie, co pozwoli na śmielsze wprowadzanie robotów do stref o bardzo wysokich poziomach dawki. Prace badawczo-rozwojowe obejmują zarówno nowe rodzaje półprzewodników, jak i specjalne osłony oraz techniki rozpraszania energii promieniowania. Ich efekty wpłyną nie tylko na sektor jądrowy, lecz również na robotykę kosmiczną i zastosowania wojskowe.
W dłuższej perspektywie wdrożenie zaawansowanych systemów robotycznych do przeglądów elektrowni atomowych może stać się jednym z głównych argumentów na rzecz przedłużania życia istniejących bloków, a także budowy nowych jednostek zaprojektowanych od początku z myślą o pełnej współpracy z robotami. Oznacza to zmianę paradygmatu projektowego – od zakładania dominującej roli człowieka jako inspektora w kierunku modelu, w którym personel skupia się na nadzorze, analizie i podejmowaniu decyzji, natomiast zadania pomiarowe realizują wyspecjalizowane systemy robotyczne.
W ten sposób roboty stają się nie tylko narzędziem poprawy bezpieczeństwa i efektywności w istniejących obiektach, lecz także integralnym elementem wizji przyszłej energetyki jądrowej, opartej na wysokim poziomie automatyzacji, zaawansowanej analityce danych i wielopoziomowych barierach ochronnych. Włączenie ich w procesy projektowe, eksploatacyjne i wycofywania z ruchu elektrowni to jeden z kluczowych kroków na drodze do utrzymania wysokiej akceptacji społecznej dla tej formy wytwarzania energii, której znaczenie w kontekście globalnej dekarbonizacji gospodarki będzie prawdopodobnie nadal rosło.
Rozwój robotyki w przeglądach elektrowni atomowych ma również istotny wymiar edukacyjny i kompetencyjny. Wymusza ścisłą współpracę specjalistów z zakresu inżynierii jądrowej, automatyki, informatyki oraz nauk materiałowych. Powstają interdyscyplinarne zespoły, w których wiedza o fizyce reaktora i zagadnieniach bezpieczeństwa jest łączona z kompetencjami w dziedzinie projektowania zaawansowanych algorytmów sterowania, przetwarzania obrazów czy cyberbezpieczeństwa. Dzięki temu sektor energetyki jądrowej staje się coraz bardziej atrakcyjnym polem rozwoju technologicznego, przyciągającym talenty z różnych dziedzin.
Dla przemysłu energetycznego jako całości rosnąca rola robotów w inspekcjach oznacza wyznaczenie nowych standardów, które z czasem mogą być przenoszone także do innych segmentów, takich jak energetyka konwencjonalna, sieci przesyłowe, instalacje odnawialne czy magazyny energii. Zintegrowane podejście do utrzymania ruchu, oparte na zdalnych systemach pomiarowych, zrobotyzowanych inspekcjach i zaawansowanej analityce danych, stanie się prawdopodobnie wspólną platformą rozwoju całego sektora. W tym sensie doświadczenia zdobywane w najbardziej wymagającym środowisku, jakim są elektrownie jądrowe, pełnią rolę katalizatora innowacji dla całej gospodarki energetycznej.
Transformacja ta wymaga jednak stałego dialogu między operatorami, firmami technologicznymi, regulatorami i środowiskiem naukowym. Tylko w ten sposób można zapewnić, że nowe rozwiązania będą nie tylko technicznie zaawansowane, ale także zgodne z rygorystycznymi kryteriami bezpieczeństwa, efektywne kosztowo i akceptowalne społecznie. Wykorzystanie robotów w przeglądach elektrowni atomowych nie jest bowiem celem samym w sobie, lecz narzędziem służącym realizacji szerszego celu, jakim jest bezpieczne, niezawodne i odpowiedzialne dostarczanie energii w realiach globalnych wyzwań klimatycznych i gospodarczych.







{kind=link}
{kind=link}